
Lee, S. M., Jung, W. K., Ahn, S. H., & Park, J. (2022). Development of a 4D hand gripping aid using a knitted Shape Memory Alloy and evaluation of finger-bending angles in elderly women. Fashion and Textiles, 9(11), 1-16. https://doi.org/10.1186/s40691-021-00280-7
Collaboration with IDIM at Seoul National University
Funding: This work was supported by Seoul National University Research Grant in 2021 and the National Research Foundation of Korea (NRF) grant funded by the Korean Government (MSIT) (2016R1A5A1938472.

Prototype of 4D gripping aid
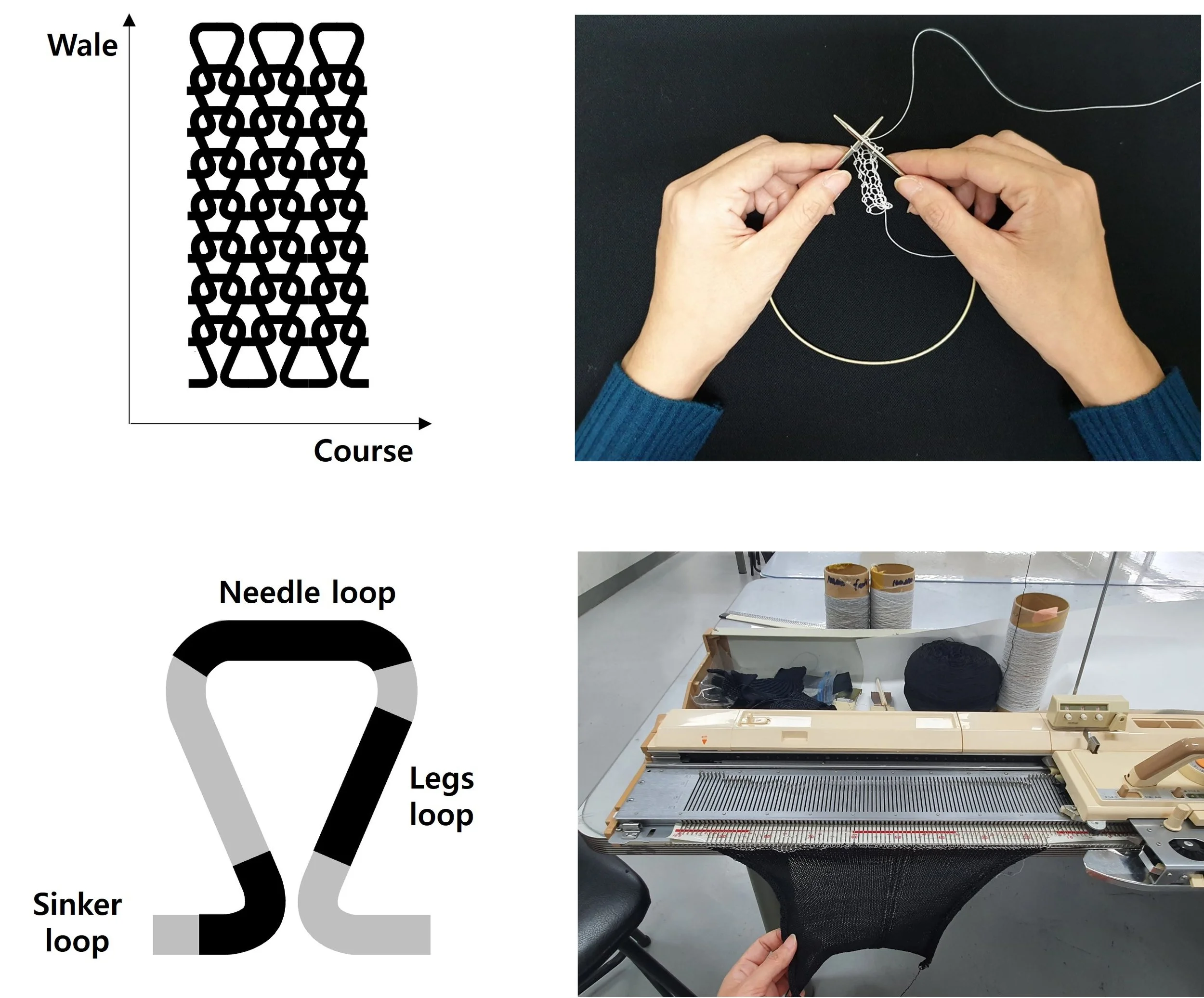
Development of knit modules using hand knitting and knitting machine

Actuation assessment of the plain knitted shape memory alloy
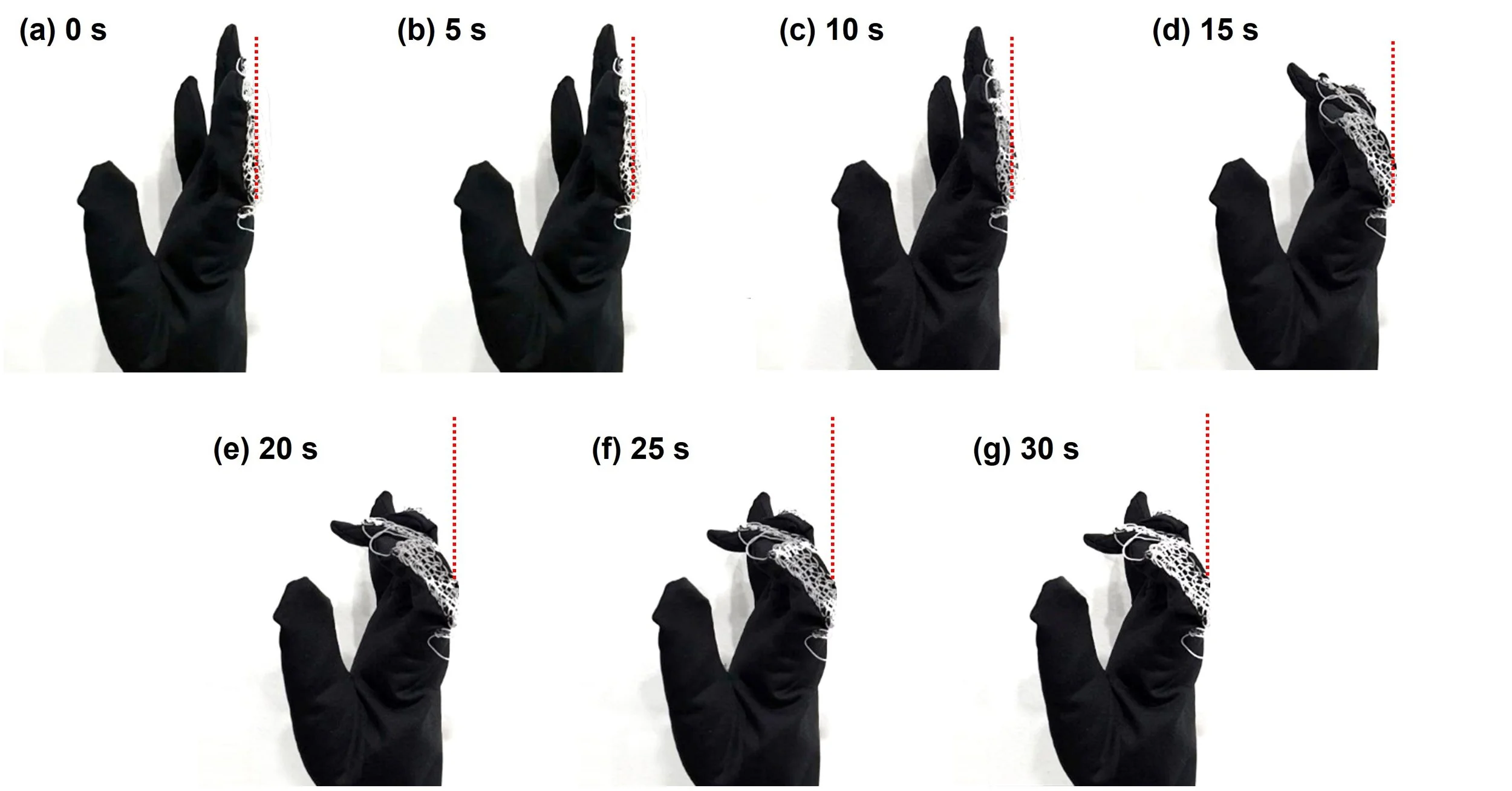
Actuation assessment of 4D hand gripping aid

3D printing for gripping aid’s nails
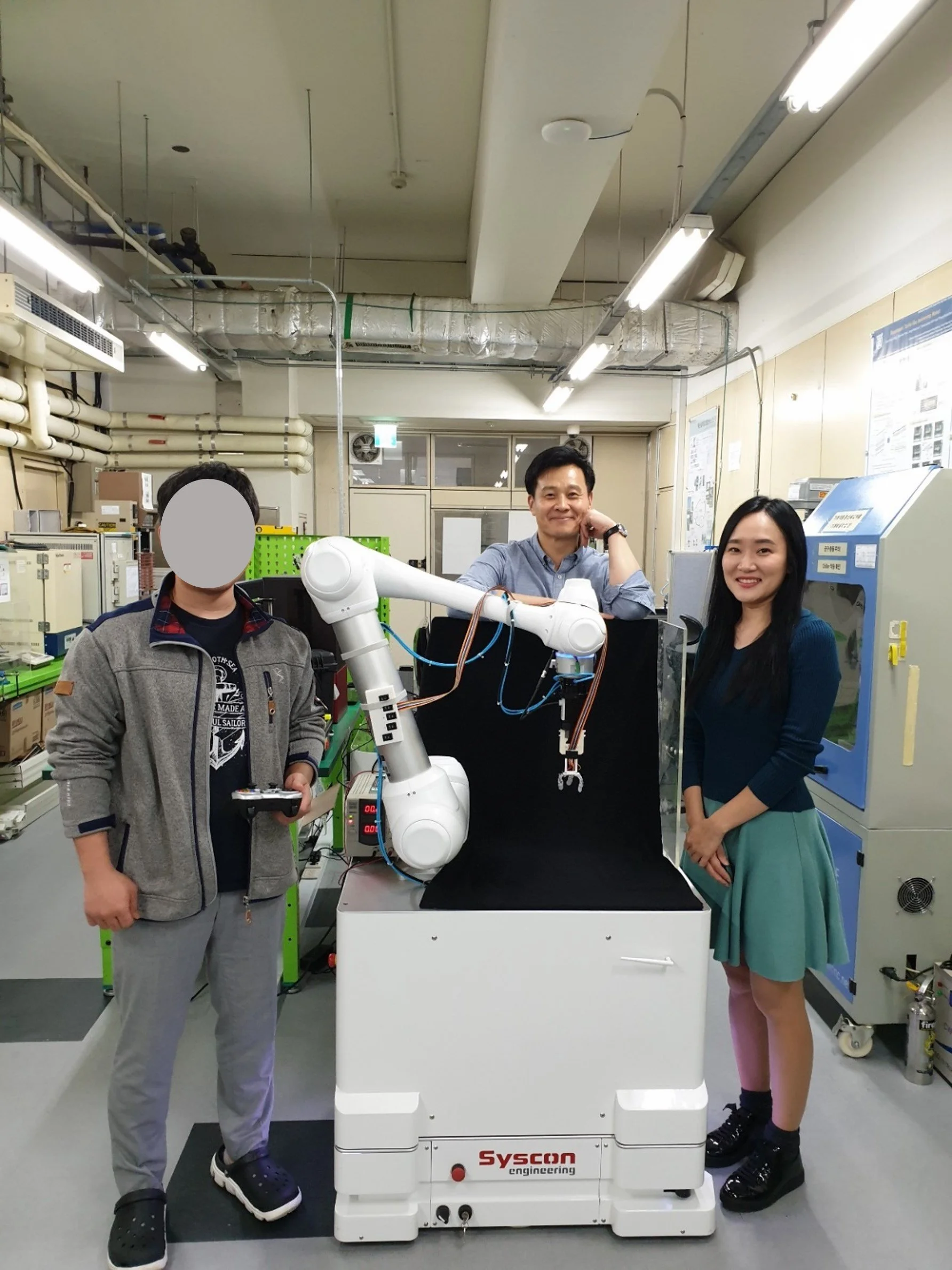
Competing with conventional robotic arms and 4D gripping aid
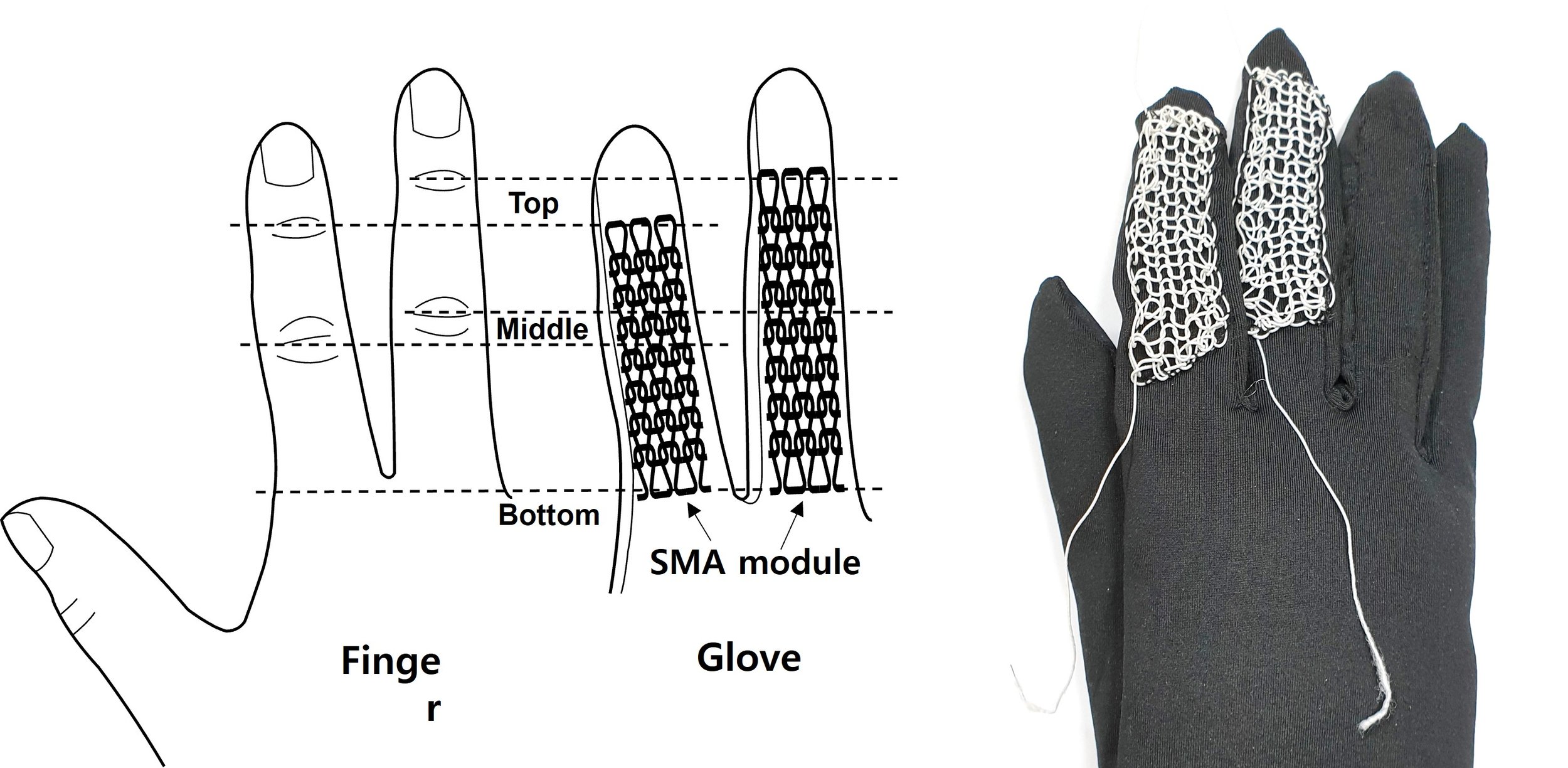
Knitted shape memory alloy placed on the index and middle finger regions

Final prototype of 4D hand gripping aid